Strona 1 z 1
Na dwóch poziomych równoległych szynach
: 7 gru 2021, o 17:55
autor: SZQ_
Na dwóch poziomych równoległych szynach leży prostopadle do nich cienkościenna rura o masie \(\displaystyle{ m = 4 kg}\), na którą nawinięta jest linka. Do zwisającej pionowo linki przyłożono stałą siłę \(\displaystyle{ F = 10 N}\). Znaleźć przyspieszenie środka masy rury oraz najmniejszą wartość współczynnika tarcia między walcem a szynami, przy której będzie się on toczył bez poślizgu. Przyspieszenie ziemskie \(\displaystyle{ g = 10 m/s^{2}}\).
Zrobiłem rysunek, rozpisałem równania dla ruchu i postępowego i obrotowego:
Ruch postępowy:
\(\displaystyle{
F_{wyp}=F-T=ma}\)
Ruch obrotowy:
\(\displaystyle{
\vec{M_{1}} = \vec{R} \times \vec{F}\\
\vec{M_{2}} = \vec{R} \times \vec{T}\\
\vec{M_{wyp}}=\vec{M_{1}} + \vec{M_{2}}
}\)
R jest promieniem rury(jeśliby jąpostawić, to byłby to promień jejpodstawy) oraz T to siła tarcia.
Tak naprawdę traktuję tą rurę jako walec, więc moment bezwładności \(\displaystyle{ = \frac{1}{2}mR^{2}}\).
Epsilon będzie ujemne, bo ruch obrotowy jest zgodny ze wskazówkami zegara, więc \(\displaystyle{ M_{wyp}=RT-RF}\).
\(\displaystyle{ RT-RF=I \epsilon}\). Kiedy za mom. bezwładności podstawię wcześniejsze równanie, a także za epsilona dam \(\displaystyle{ \frac{a}{R}}\). To po kilku działaniach dojdę do \(\displaystyle{ 3T=3F}\), czyli T=F. Co robię źle?
Dodano po 7 minutach 51 sekundach:
Moment bezwładności chyba powinien być jednak \(\displaystyle{ mR^{2}}\), co doprowadzi mnie do T-F = F-T, czyli do niczego mnie to nie doprowadza.
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 08:33
autor: janusz47
Ruch rury jest złożeniem ruchu postępowego i ruchu obrotowego względem osi symetrii rury.
Rozkład sił działających na rurę (rysunek):
\(\displaystyle{ \vec{T}_{statyczne}, \ \ \vec{N}_{nacisku },\ \ \vec{F}, \ \ \vec{F}_{grawitacji}, \ \ \vec{F}_{ naciągu }, \ \ \vec{R}_{reakcji}.}\)
Z drugiej zasady dynamiki Newtona dla ruchu postępowego:
\(\displaystyle{ \vec{T}_{statyczne} = m\cdot a}\)
Z drugiej zasady dla ruchu obrotowego:
\(\displaystyle{ M = I \cdot \varepsilon}\)
Moment bezwładności dla rury, którą traktujemy jako walec:
\(\displaystyle{ I = \frac{1}{2}m\cdot R^2 }\)
\(\displaystyle{ \varepsilon = \frac{a}{R} }\)
Wartość momentu siły tarcia:
\(\displaystyle{ M_{T_{statyczne}} = R\cdot T_{statyczne} }\)
Wartość momentu siły naciągu nici:
\(\displaystyle{ M_{F_{naciągu}} = R \cdot F_{naciągu} }\)
Wartość momentu wypadkowego (siły rury):
\(\displaystyle{ M = M_{F_{naciągu}} - M_{T_{statyczne}}}\)
Z drugiej zasady dynamiki dla ruchu obrotowego:
\(\displaystyle{ M = I \cdot \varepsilon }\)
\(\displaystyle{ R \cdot F_{naciągu} -R\cdot T_{statyczne} = \frac{1}{2}m\cdot R^2\cdot \frac{a}{R} }\)
Zachodzi równość:
\(\displaystyle{ F_{naciągu} = F }\)
\(\displaystyle{ F - m\cdot a = \frac{1}{2} m\cdot a }\)
\(\displaystyle{ F = \frac{3}{2}m\cdot a }\)
\(\displaystyle{ a = \frac{2}{3} \cdot \frac{F}{m}. }\)
Siła nacisku działa na dwie szyny, możemy więc wartość siły tarcia przedstawić w postaci równania:
\(\displaystyle{ 2T = T_{statyczne} }\)
\(\displaystyle{ T = \frac{1}{2}T_{statyczne} }\)
\(\displaystyle{ T = \frac{1}{2}f \cdot N_{nacisku}, \ \ f - }\) współczynnik tarcia statycznego.
Wartość siły nacisku:
\(\displaystyle{ N_{nacisku} = F+ F_{grawitacji} = F + m\cdot g.}\)
Rura będzie toczyła się bez poślizgu, gdy współczynnik tarcia stycznego będzie niemniejszy (większy bądź równy) od stosunku podwojonej wartości siły tarcia do siły nacisku:
\(\displaystyle{ f \geq \frac{2T}{N_{nacisku}} }\)
\(\displaystyle{ f\geq \frac{2( F - m\cdot a)}{ F + m\cdot g}.}\)
Drugi sposób
Wartość przyśpieszenia \(\displaystyle{ a }\) środka masy rury można wyznaczyć, traktując ruch rury wyłącznie jako obrotowy względem chwilowej osi obrotu.
Rysunek
\(\displaystyle{ r = R\cdot \sqrt{2} }\)
\(\displaystyle{ M = r\times F_{naciągu}}\)
\(\displaystyle{ M = r\cdot F_{naciągu}\cdot \sin(45^{o}) }\)
\(\displaystyle{ M = R \cdot \sqrt{2}\cdot F_{naciągu} \cdot \frac{1}{\sqrt{2}} }\)
\(\displaystyle{ M = R\cdot F_{naciągu} }\)
Z twierdzenia Steinera obliczamy moment bezładności rury względem osi obrotu.
\(\displaystyle{ I_{o} = I + m \cdot R^2 }\)
\(\displaystyle{ I_{0} = \frac{1}{2}m\cdot R^2+ m \cdot R^2 = \frac{3}{2}m \cdot R^2 }\)
Z drugiej zasady dynamiki Newtona otrzymujemy
\(\displaystyle{ I_{o}\cdot \varepsilon = M }\)
\(\displaystyle{ \frac{3}{2}m\cdot R^2\cdot \frac{a}{R} = F_{naciągu}\cdot R }\)
\(\displaystyle{ \frac{3}{2}m\cdot a = F }\)
\(\displaystyle{ a = \frac{2}{3}\cdot \frac{F}{m}}\)
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 10:31
autor: SZQ_
Dziękuję za odpowiedź! Mam jeszcze kilka wątpliwości, więc się spytam:
Dlaczego wziął Pan tylko i wyłącznie siłę tarcia jako powodującą ruch postępowy? Siła zewnętrzna również powoduje ten ruch, prawda? Siła zewnętrzna jest przyłożona do nici w kierunku (dla najpopularniejszego układu odniesienia) ujemnym osi Y, ale to nie oznacza, że działa tylko w tym miejscu. Ta siła również działa w punkcie styczności z rurą i jest skierowana w kierunku dodatnim osi X. Gdyby siła tarcia była jedyną siłą, która działa na rurę dla ruchu postępowego, to ruch ten odbywałby się zgodnie z siłą tarcia (a przecież siła tarcia jest skierowana zawsze w przeciwnym kierunku do ruchu), a więc w kierunku ujemnym osi X.
Jeśli, by wyliczyć współczynnik tarcia wziął Pan, że \(\displaystyle{ T=2T_{styczne}}\), to dlaczego nie używał Pan tego wcześniej, obliczając przyspieszenie?
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 12:44
autor: janusz47
Za ruch postępowy rury odpowiada tylko siła \(\displaystyle{ \vec{T}_{stat}.}\)
Siła tarcia statycznego jest zwrócona przeciwnie do kierunku ruchu punktów styku rury z szynami. Czyli jeśli walec porusza się w prawo, to każdy z punktów styku walca z szynami porusza się w lewo, czyli siła tarcia jest zwrócona w prawo.
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 13:25
autor: SZQ_
janusz47 pisze: 8 gru 2021, o 12:44
Za ruch postępowy rury odpowiada tylko siła
\(\displaystyle{ \vec{T}_{stat}.}\)
Siła tarcia statycznego jest zwrócona przeciwnie do kierunku ruchu punktów styku rury z szynami. Czyli jeśli walec porusza się w prawo, to każdy z punktów styku walca z szynami porusza się w lewo, czyli siła tarcia jest zwrócona w prawo.
Rozumiem już tą siłę tarcia statycznego, ale ciągle nie rozumiem dlaczego siła F nie została przez Pana uwzględniona.
(czerwona strzałka pokazuje tylko, to że wektor F nici może zostać zapisany w innym miejscu - wskazanym przez strzałkę. Przynajmniej tak mi się zdaje.
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 13:44
autor: janusz47
Skąd ten czerwony wektor siły \(\displaystyle{ \vec{F}, }\) kiedy zwrot jej jest pionowo do dołu ? Dlaczego siła \(\displaystyle{ \vec{T}_{s} }\) zwrócona jest w lewo?
Z jakiego zbioru zadań korzystasz ?
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 13:52
autor: SZQ_
janusz47 pisze: 8 gru 2021, o 13:44
Skąd ten czerwony wektor siły
\(\displaystyle{ \vec{F}, }\) kiedy zwrot jej jest pionowo do dołu ? [/latex]
(czerwona strzałka pokazuje tylko, to że wektor F nici może zostać zapisany w innym miejscu - wskazanym przez strzałkę; nie jest wektorem.)
janusz47 pisze: 8 gru 2021, o 13:44
Dlaczego siła
\(\displaystyle{ \vec{T}_{s} }\) zwrócona jest w lewo?
Ah źle zapisałem, oczywiście powinna być w prawo.
janusz47 pisze: 8 gru 2021, o 13:44
Z jakiego zbioru zadań korzystasz ?
Zbiór zadań, który dostałem na ćwiczeniach na studiach... podobno zadania pochodzą z jakichś starych rosyjskich podręczników

Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 14:37
autor: AiDi
SZQ_ pisze: 8 gru 2021, o 10:31
Siła zewnętrzna również powoduje ten ruch, prawda?
Pośrednio, przez wywołanie ruchu obrotowego. Ale skoro działa pionowo w dół, to nie możesz jej zapisać jako działającej poziomo. To o czym myślisz to tarcie liny o walec wywołane tą siłą zewnętrzną, ale to tarcie nie jest siłą zewnętrzną więc nie bierzesz go pod uwagę.
Identyczne (co do idei) zadanie znaleźć można w zbiorze WSiP.
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 14:47
autor: janusz47
Załóżmy, że szyny nie są jednakowe.
Zgodnie z drugą zasadą dynamiki Newtona zrzutujemy wektory sił na osie \(\displaystyle{ Ox }\) i \(\displaystyle{ Oy,}\) przyjmując zwrot osi \(\displaystyle{ Ox }\) zgodny z jej ruchem postępowym - w prawo, a zwrot osi \(\displaystyle{ Oy - }\) pionowo do góry.
\(\displaystyle{ Ox: \ \ F_{r1} + F_{r2} = m\cdot a \ \ (1) }\)
\(\displaystyle{ Oy: \ \ F_{N1} + F_{N2} - mg - F = 0 \ \ (2)}\)
Dla ruchu obrotowego:
\(\displaystyle{ M = I \cdot \varepsilon \ \ (3)}\)
\(\displaystyle{ a = \varepsilon \cdot R \ \ (4) }\)
Na podstawie równań \(\displaystyle{ 1- 4: }\)
\(\displaystyle{ F \cdot R - (F_{r1} + F_{r2})\cdot R = \frac{1}{2} \cdot m \cdot R^2\cdot \varepsilon = \frac{1}{2} \cdot m \cdot R^2 \cdot \frac{a}{R} \ \ (5)}\)
Dodatkowo"
\(\displaystyle{ F_{r1} + F_{r2} \leq f \cdot (F_{N1} + F_{N2}) \ \ (6) }\)
Wyznacz odpowiednio z równania \(\displaystyle{ (5) }\) i nierówności \(\displaystyle{ (6), \ \ a, \ \ f . }\)
Re: Na dwóch poziomych równoległych szynach
: 8 gru 2021, o 18:42
autor: siwymech
- baead8d53ad9cf16med.jpg (35.43 KiB) Przejrzano 837 razy
1.
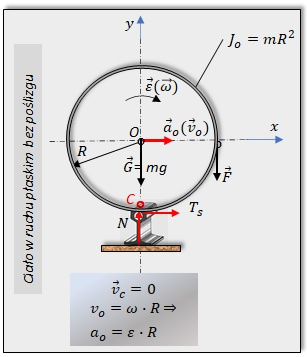
Ruch płaski bryły sztywnej. Toczenie ciała bez poślizgu(toczenie czyste)
Ciało(rura) porusza się ruchem płaskim, który składa się z ruchu postępowego i obrotowego. W punkcie styku ( p.C na rysunku) rury cienkościennej) i podłoża prędkości muszą być sobie równe. Skoro prędkość podłoża jest równa zeru, to i ten sam punkt na rurze ma prędkość równa zeru. Punkt C w teorii ruchu płaskiego jest chwilowym środkiem obrotu.
{ W punkcie C zaczepiamy siłę tarcia!}
W przypadku toczenia bez poślizgu, występuje
tarcie nierozwinięte(statyczne) między ciałem, a podłożem.
Siłę tarcia oznaczono na rys. jako
\(\displaystyle{ F_{s} }\) i zawarta jest w przedziale:
\(\displaystyle{ 0 \le F _{s} \le \mu \cdot N }\),
Oznacza to, że jeśli zakładam toczenie bez poślizgu, zakładam również, że współczynnik tarcia µ jest tak duży lub siła tarcia w czasie toczenia krążka bez poślizgu tak mała, że przyłożona siła tarcia
\(\displaystyle{ F _{s} }\) znajdzie się w podanym wyżej przedziale.
------------------------------------------------------------------------------------------------------------------------------------------
2. Dynamiczne równania ruchu postępowego oraz obrotowego dla środka masy pozwalają określić szukane wielkości:
2.1.
Równania ruchu postępowego środka masy w kierunku osi
\(\displaystyle{ x, y}\). Przyjęto układ osi jak na rysunku.
\(\displaystyle{ 2T_{s}=m \cdot a _{x} }\), (1)
\(\displaystyle{ -mg+2N-F=m \cdot a _{y}, \quad a _{y}=0 }\)- brak ruchu w kierunku osi y.
\(\displaystyle{ -mg+2N-F=0}\), (2)
\(\displaystyle{ a _{o}= \sqrt{a ^{2} _{x} + a ^{2} _{y} } =a _{x} }\)
2.2.
Dynamiczne równania ruchu obrotowego dla środka masy( punkt O) :
\(\displaystyle{ M _{o} =J _{o} \cdot \varepsilon }\), (3)
\(\displaystyle{ F \cdot R-2T \cdot R=J \cdot \varepsilon}\)
Gdzie
\(\displaystyle{ J _{o}=m \cdot R ^{2} }\)- rura cienkościenna
{UWAGA: Ciało opiera się na dwóch podporach -szynach- wystąpią więc dwie siły oporu -tarcia. Na rysunku mamy widok na czoło rury! )}
3. Dodatkowe równanie otrzymamy wykorzystując pojęcie chwilowego środka obrotu. Punkt C na rysunku.
\(\displaystyle{ v _{o}= \omega \cdot R }\), po zróżniczkowaniu względem czasu otrzymamy, związek między przyśpieszeniami liniowym i kątowym:
\(\displaystyle{ a _{o}=\varepsilon \cdot R }\), (4)
................................
P.S.
Podziękowania i wyrazy uznania dla Pana Janusza 47 .